Using Rubik's cube to improve and evaluate robot manipulation
4.8 (619) · € 20.50 · En Stock
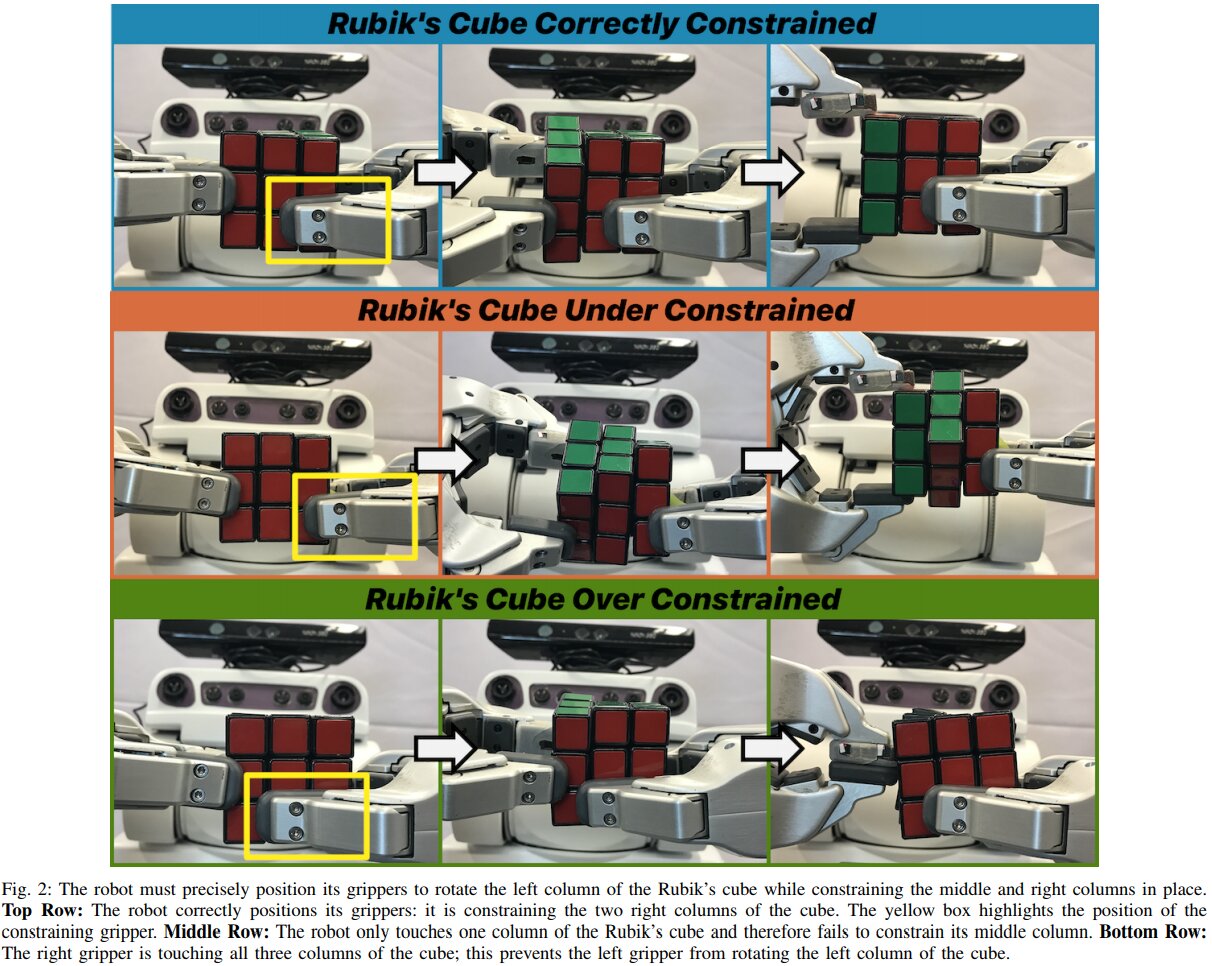
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik's Cube, the well-known 3D combination puzzle invented by the Hungarian sculpture and architect Ernő Rubik.
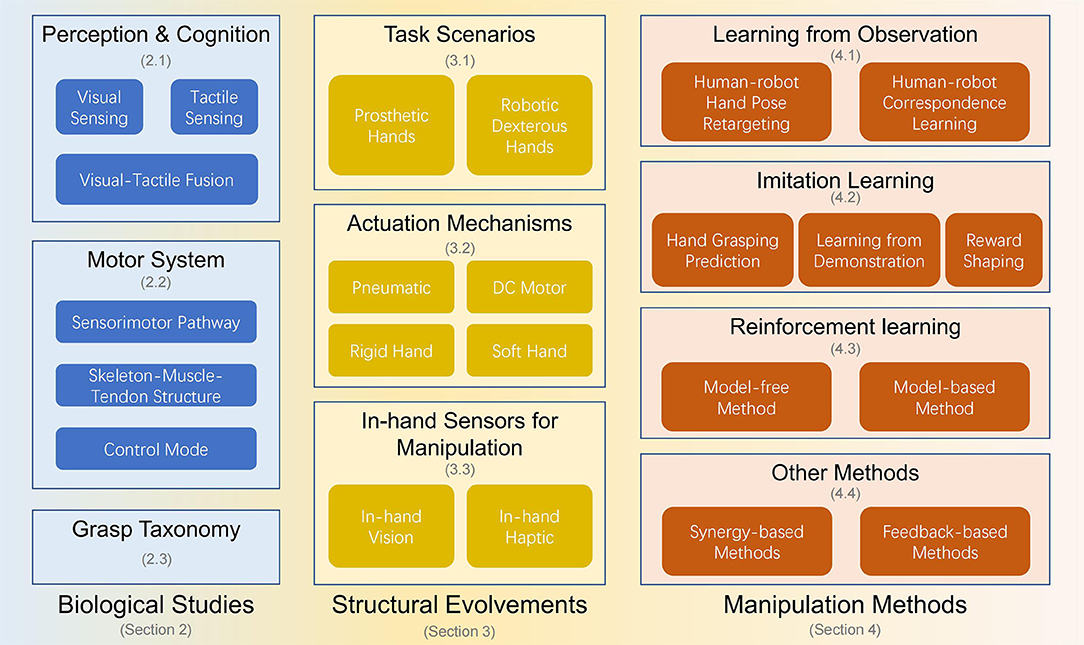
Frontiers A Survey of Multifingered Robotic Manipulation: Biological Results, Structural Evolvements, and Learning Methods
Andrew would like to put six different Rubik's cubes onto three shelves. b In how many ways can Andrew do this, if each shelf must have at least one Rubik's cube?
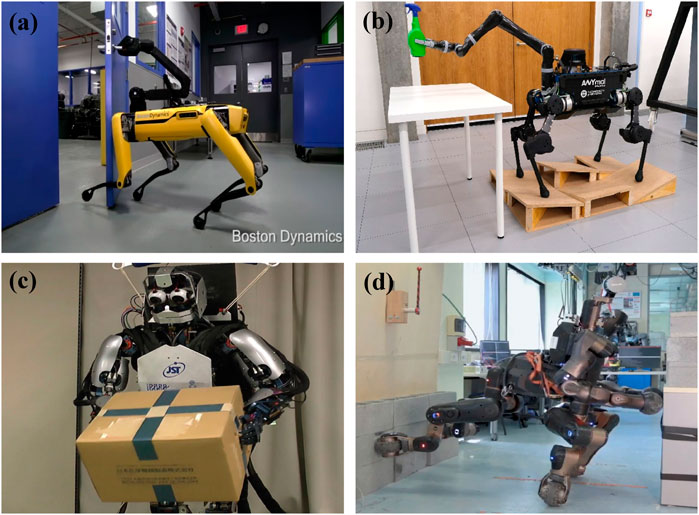
Frontiers Legged robots for object manipulation: A review

OpenAI teaches a robotic hand to solve a Rubik's cube
Andrew would like to put six different Rubik's cubes onto three shelves. b In how many ways can Andrew do this, if each shelf must have at least one Rubik's cube?

Figure 9 from Solving Rubik's Cube with a Robot Hand
How OpenAI Used Meta-Learning to Build a Robotic Hand that can Solve the Rubik's Cube, by Jesus Rodriguez, DataSeries

A method for understanding and digitizing manipulation activities using programming by demonstration in robotic applications - ScienceDirect
Rubik's cube presents the ultimate test of a robot's manipulation skills